Sistema de Levas
Utilidad
Permite obtener un movimiento lineal alternativo, o uno oscilante, a partir de uno giratorio; pero no nos permite obtener el giratorio a partir de uno lineal alternativo (o de uno oscilante). Es un mecanismo no reversible.
Este mecanismo se emplea en: motores de automóviles (para la apertura y cierre de las válvulas), programadores de lavadoras (para la apertura y cierre de los circuitos que gobiernan su funcionamiento), carretes de pesca (mecanismo de avance-retroceso del carrete), cortapelos, depiladoras, cerraduras.
Descripción
Para su correcto funcionamiento, este mecanismo necesita, al menos: árbol, soporte, leva y seguidor de leva (palpador) acompañado de un sistema de recuperación (muelle, resorte...).
- El árbol es el eje de giro de la leva y el encargado de transmitirle su movimiento giratorio.
- El soporte es el encargado de mantener unido todo el conjunto y, normalmente, guiar el movimiento del seguidor
- La leva es siempre la que recibe el movimiento giratorio a través del eje o del árbol en el que está montada. Su perfil hace que el seguidor ejecute un ciclo de movimientos muy preciso.
- El seguidor (palpador) apoya directamente sobre el perfil de la leva y se mueve a medida que ella gira. Para conseguir que el seguidor esté permanentemente en contacto con la leva es necesario dotarlo de un sistema de recuperación (normalmente un muelle o un resorte)
La leva va solidaria con un eje (árbol) que le transmite el movimiento giratorio; en muchas aplicaciones se recurre a montar varias levas sobre un mismo eje o árbol (árbol de levas), lo que permite la sincronización del movimiento de varios seguidores a la vez.
Seguidor de leva
Según el tipo de movimiento que queramos obtener a la salida, se puede recurrir a dos tipos de seguidores: émbolo y palanca
Émbolo, si queremos que el movimiento de salida sea lineal alternativo.
En el ejemplo vemos el sistema simplificado de distribución del motor de un coche. La válvula actúa como émbolo y se combina con un empujador, que es el que está en contacto directo con la leva gracias a al acción del muelle.
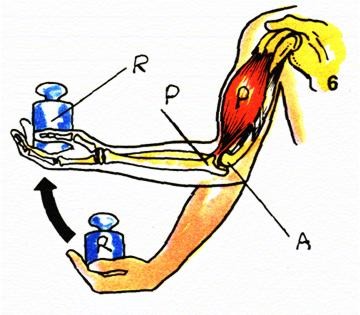
Palanca, si queremos que el movimiento de salida sea oscilante.
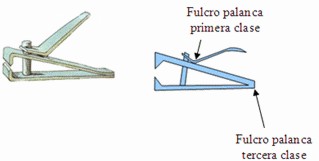
En este caso emplearemos la palanca de primer o tercer grado para amplificar el movimiento y la de primero o segundo para atenuarlo.
El mecanismo suele complementarse con un muelle de recuperación que permite que el palpador (seguidor de leva) se mantenga en contacto con el perfil de la biela en todo momento.
Características
En los mecanismos de levas, el diseño del perfil de leva siempre estará en función del movimiento que queramos que realice el seguidor de leva. Dicho de otro modo: la leva es el resultado del movimiento que deseemos obtener en el seguidor, por tanto, antes de construir la leva tenemos que saber cuál es el movimiento que queremos obtener.
Excéntrica-Biela-Palanca
Utilidad
Permite obtener un movimiento giratorio continuo a partir de uno oscilante, o también, obtener un movimiento oscilante a partir de uno giratorio continuo.
Se puede encontrar en las máquinas de coser (para obtener el movimiento giratorio necesario en la máquina a partir del oscilante del pie), en los limpiaparabrisas de los automóviles
Descripción
Este mecanismo emplea, al menos, una excéntrica (o una manivela ), una biela y una palanca colocados sobre un soporte único y conectados de la forma siguiente:
Desde el punto de vista de la palanca se nos pueden presentar dos casos:
· Cuando transformamos giratorio en oscilante, la potencia es suministrada por la biela a la palanca (el pie de biela será el punto de aplicación de la potencia).
· Cuando transformamos oscilante en giratorio, el mecanismo biela-manivela es la resistencia y el pie de biela es el punto de aplicación de la resistencia.
Características
Elección de la palanca adecuada.
La palanca puede ser de cualquier orden (1º, 2º ó 3º) y su elección estará en función de la utilidad que le queramos dar a la máquina.
· Cuando la máquina produce movimiento giratorio a partir de uno oscilante es frecuente emplear una palanca de tercer grado, así el movimiento de la potencia (normalmente el pie) es pequeño en relación al de la resistencia (pie de biela) y se pueden alcanzar mayores velocidades de giro.
- Cuando se emplea para producir un movimiento oscilante a partir de uno giratorio, la elección de la palanca dependerá de factores tales como sentido del movimiento, fuerza que tiene que crear y amplitud de la oscilación (ver el apartado referido a palancas para analizar cuál sería la elección más adecuada)
Un poco de historia.
El empleo de la manivela (eje acodado que se accionaba con las manos) para obtener un movimiento giratorio continuo en pequeñas máquinas tenía el inconveniente de dejar una sola mano libre para realizar el trabajo (hacer hilos, afilar, coser...), por lo que fue necesario inventar un sistema que liberase esa mano y permitiera emplear las dos de forma útil.
La solución llegó hacia 1530 cuando apareció la rueca de pedal (Johan Jürgens), lo que permitió mantener libres las dos manos para atender la fabricación de los hilos (más adelante este mismo sistema se aplicó a piedras de afilar y mucho más tarde a máquinas de coser). La rueca de pedal introdujo el sistema palanca-biela-excéntrica que sustituyó a sistemas anteriores, siendo posiblemente la primera aplicación práctica del sistema biela-manivela.
Cigüeñal-Biela
Utilidad
Permite conseguir que varias bielas se muevan de forma sincronizada con movimiento lineal alternativo a partir del giratorio que se imprime al eje del cigüeñal, o viceversa.
Este mecanismo se emplea para la sincronización de acciones a partir de un movimiento giratorio; se puede encontrar en el accionamiento secuencial de interruptores, juguetes, limpiaparabrisas...
Añadiéndole un émbolo forma el mecanismo básico de los motores de combustión interna, permitiendo producir un movimiento giratorio a partir del alternativo de varios pistones cuyos puntos muertos no se producen al mismo tiempo.
Descripción
Este mecanismo emplea un cigüeñal sobre cuyas muñequillas se han conectado sendas bielas, lo que permite obtener un comportamiento, por cada biela, similar al sistema biela-manivela.
El sistema suele complementarse con un émbolo para guiar mejor el movimiento alternativo del pie de biela. En los motores de combustión interna el propio émbolo hace de pistón.
La longitud de los brazos de las diferentes manivelas que componen el cigüeñal determina la carrera, mientras que su posición determina lasecuencia.
Características
A la hora de diseñar estos mecanismos tenemos que tener en cuenta que:
- Para que el sistema funcione correctamente se deben emplear bielas cuya longitud sea, al menos, 4 veces el radio de giro de la manivela a la que está acoplada.
- Como el mecanismo está formado por varias manivelas acopladas en serie, es necesario que los cuellos del cigüeñal (partes de eje que quedan entre las manivelas) descansen sobre soportes adecuados, esto evita que el cigüeñal entre en flexión y deje de funcionar correctamente.
- Las cabezas de las bielas deben de estar centradas en la muñequilla sobre la que giran, por lo que puede ser necesario aumentar su anchura (colocación de un casquillo).